




Hacia las interfaces cerebro-computadora como herramientas de rehabilitación motora funcional
Nuestro cerebro evolucionó a lo largo de miles de años para controlar eficientemente un dispositivo biológico grande y complejo: el cuerpo humano. En la actualidad, y gracias en parte a los avances en neurociencia e inteligencia artificial, somos capaces de extender esta capacidad de control a dispositivos externos muy diferentes de nuestro propio cuerpo. Tal es el caso, por ejemplo, del control voluntario de un brazo robótico basado solo en el deseo de la persona de realizar un movimiento determinado.
Pero ¿cómo es posible controlar un dispositivo externo mediante el pensamiento? Las interfaces cerebro-computadora (ICC) son dispositivos capaces de establecer una forma nueva y alternativa de interacción entre el cerebro de una persona y su entorno. Como todo sistema de comunicación, las ICC reciben una señal de entrada (actividad cerebral) y generan una salida (comando de control). Las ICC están constituidas por componentes que convierten (traducen) la entrada en la salida, y un protocolo de comunicación que determina el ‘lenguaje’ a utilizar durante la comunicación. Es precisamente ese lenguaje, con sus códigos y símbolos, lo que se desea detectar utilizando herramientas del procesamiento de señales e inteligencia artificial. Pero no nos adelantemos, pues aún queda un poco de marco teórico que revisar.
La primera vez que se usó el término interfaz cerebro-computadora fue en un trabajo publicado en 1973, y resultó el puntapié inicial para lo que hoy es toda una disciplina de investigación que combina los conocimientos y la tecnología de la bioingeniería, la matemática, la electrofisiología, la neurociencia y la inteligencia artificial, entre varias otras ramas de la ciencia. Si bien las aplicaciones de las ICC son muchas, todas buscan mejorar o potenciar la capacidad del sistema nervioso central de una persona. Hoy en día, aunque es necesaria aún mucha investigación, estas tecnologías constituyen un prometedor abordaje para la rehabilitación neurofuncional de pacientes que han sobrevivido a un accidente cerebro vascular (ACV). Se trata de la tercera causa de impedimento motor permanente a nivel global con 15 millones de personas por año que lo padecen (de acuerdo con la Organización Mundial de la Salud) y que provoca varios grados de paresia en las extremidades superiores en aproximadamente un tercio de los casos. En la Argentina, el último informe del Ministerio de Salud de la Nación indica que esta patología afecta anualmente a más de 80.000 personas.
¿DE QUÉ SE TRATA?
Bioingeniería beneficiada por la interdisciplinariedad. Interfaces cerebro-computadora.
Los procedimientos de rehabilitación tradicionales para personas con pérdida del control motor del miembro superior están fuertemente orientados a que el paciente use más a menudo su mano afectada, sea a través de movimientos activos (controlados por el sujeto) o pasivos (por ejemplo, realizados mediante la ayuda de un fisioterapeuta). La imaginación del movimiento de la mano provoca patrones de activación cerebral similares a los que se producen cuando realmente se ejecuta dicho movimiento. Estos cambios pueden ser observados mediante métodos no invasivos de registro de la actividad cerebral. Una de las formas más prácticas, sencillas y económicas para medir la actividad cerebral es mediante la electroencefalografía (EEG) de superficie. En el contexto de una ICC para control de un brazo robótico, el lenguaje de comunicación cerebro-máquina más utilizado es el basado en la denominada ‘práctica mental motora’ o imaginería motora (IM). En este sentido, la actividad cerebral asociada al deseo/imaginación de un cierto movimiento puede transformarse directamente en ejecución de movimiento, cerrando así el lazo entre la intención y el movimiento motor.
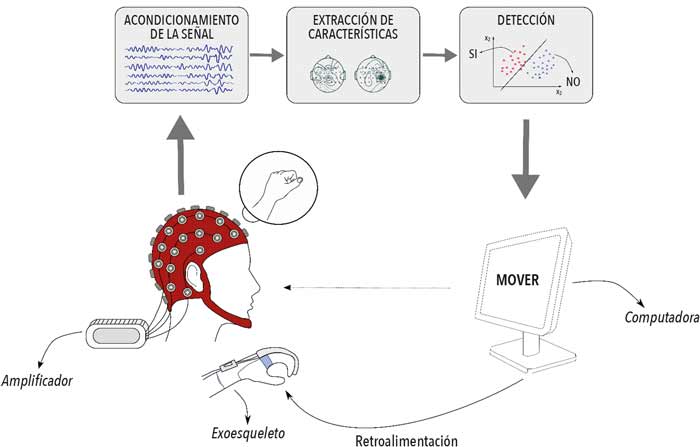
Una ICC no es un lector de la mente, es más bien un detector de cambios (a veces muy pequeños) en la actividad cerebral asociada a un cierto pensamiento o estimulación externa. En las ICC para rehabilitación motora, lo que se desea detectar son las señales denominadas ritmos sensoriomotores (RSM), asociados a la IM de la mano afectada. La información de estas señales se encuentra bien localizada en frecuencia (entre 13 y 30Hz) así como en la posición en el espacio, dada por la grilla de electrodos de EEG. La comunicación persona-computadora se basa en un protocolo de estimulación, que indicará, en primera instancia, cuándo es el comienzo y cuándo es el fin de la imaginación del movimiento. De esta manera, se cuenta también con la información temporal (momento de comienzo y fin) asociada a los RSM. La figura muestra un esquema básico de una ICC. La persona, con la gorra de electrodos de medición de EEG, recibe de la computadora un indicador visual para el comienzo y el fin de la imaginación. La actividad neuronal registrada pasa por diferentes etapas de acondicionamiento y procesamiento, hasta llegar a una etapa de extracción de características clave y su clasificación final, en donde se decide si el segmento de EEG procesado tiene RSM, y por lo tanto implica un deseo de movimiento. En conjunto estas tres etapas –1) acondicionamiento; 2) extracción de características, y 3) clasificación– determinan la eficiencia del algoritmo de traducción, el encargado de transformar la actividad cerebral en comandos de control.
Una ICC con aplicaciones en rehabilitación será, muy probablemente, utilizada en varias sesiones, a lo largo de varios días. La posición de los electrodos, su impedancia, las condiciones del ambiente, así como las horas de sueño, el nivel de fatiga y de atención del usuario de la ICC, provocan que la señal de EEG varíe con el tiempo. Los modelos de aprendizaje maquinal se basan en la premisa de que los datos utilizados durante su entrenamiento son un subconjunto de datos representativos del problema a abordar. Cuando un algoritmo de aprendizaje maquinal se entrena para detectar imaginación de movimiento utilizando datos de una sesión de ICC, su evaluación en datos nunca vistos, pertenecientes a una nueva sesión, puede resultar en desempeños poco satisfactorios. A este fenómeno se lo conoce como cambio de dominio, ya que se trata de dos conjuntos de datos que pertenecen a dominios diferentes, aunque ‘parecidos’. Desde un punto de vista más matemático, el cambio de dominio refiere a un cambio en la distribución de probabilidad de los datos.
Los algoritmos de traducción dentro de las ICC para rehabilitación deben ser entonces capaces de sortear estos cambios en los datos utilizados para aprender el modelo de decodificación y los datos utilizados durante la terapia de rehabilitación. Una manera de abordar este desafío es mediante la construcción de los llamados métodos de adaptación de dominio, con los cuales se intenta conseguir que las distribuciones de probabilidad de los datos de testeo y de entrenamiento se parezcan entre sí.
Ahora bien, si imaginamos que las distribuciones de probabilidad de los datos representan ciertas masas, y que lo que deseamos es transportar una masa sobre otra, el problema de adaptación de dominio puede abordarse mediante herramientas ya conocidas como las que brinda el llamado transporte óptimo. El transporte óptimo fue propuesto por el francés Gaspard Monge (1746-1818) en 1781 y luego por el soviético Leonid Kantorovich (1912-1986) en 1942, y es una teoría matemática que resuelve el problema de transportar una cierta masa de un lado a otro con el menor costo posible. En 2017 un grupo europeo liderado por Nicolas Courty propuso usar el transporte óptimo como herramienta de adaptación de dominio en el contexto de aprendizaje maquinal. Los autores lograron una implementación computacional rápida y efectiva de la adaptación de dominio (AD-TO) que puede pensarse en tres etapas: 1) el aprendizaje del cambio de distribución entre los datos de entrenamiento y testeo; 2) la transformación de los datos de entrenamiento tal que se ‘parezcan’ a los datos de testeo, y 3) el entrenamiento de un nuevo clasificador utilizando los datos de entrenamiento transformados. Esta estrategia de adaptación de dominio ha mostrado ser eficaz en diferentes aplicaciones de aprendizaje maquinal.
Sin embargo, la AD-TO no está exenta de dificultades: 1) hay que entrenar un nuevo clasificador cada vez que hay un cambio de dominio, y 2) la totalidad de los datos de testeo deben de estar disponibles al momento de realizar la adaptación. Una colaboración entre investigadores de la UNL y el Conicet –de los institutos IMAL y sinc(i), y del Tecnológico de Zúrich (ETHZ)– mostró cómo puede utilizarse la AD-TO para rehabilitación. Para ello, a modo de evitar el entrenamiento del clasificador se propuso aprender el cambio en la distribución de los datos desde el dominio de testeo hacia el de entrenamiento de forma que los datos a transformar sean los de testeo y no los de entrenamiento. Dado que de esta manera se aprende el cambio en la distribución de los datos desde una nueva sesión hacia una vieja sesión de ICC, denominaron a esta novedosa implementación como AD-TO hacia atrás. Asimismo, considerando que las ICC deben procesar los datos de la nueva sesión en tiempo real, el equipo propuso estrategias para abordar la adaptación durante la sesión de rehabilitación. Los resultados mostraron que el tiempo de adaptación es cien veces más rápido que aquel alcanzado por el competidor más cercano en aciertos de clasificación.
Esta novedosa manera de atacar el problema de variabilidad entre sesiones de una ICC adquiere aún más relevancia cuando contextualizamos su uso para rehabilitación. Mediante este tipo de métodos adaptativos se perderá menos tiempo en la recalibración del modelo, instancia en la que el paciente no recibe ningún tipo de realimentación. Lo que se busca es mejorar la practicidad en el uso de sistemas ICC para rehabilitación. El próximo paso de esta investigación será la realización de pruebas en tiempo real, con participantes sin patologías, para finalmente llegar a las pruebas con pacientes en rehabilitación.
La autora quiere agradecer a cada uno de los colaboradores de este proyecto, por las instancias de discusiones de experimentos, resultados y sus implicancias en la práctica clínica.
LECTURAS SUGERIDAS
COURTY N et al., 2016, ‘Optimal transport for domain adaptation’, IEEE Transactions on Pattern Analysis and Machine Intelligence, 39 (9): 1853-1865.
PETERSON V et al., 2021, ‘Transfer learning based on optimal transport for motor imagery brain-computer interfaces’, IEEE Transactions on Biomedical Engineering, 69 (2): 807-817.
WOLPAW JR & WOLPAW EW, 2012, Brain-Computer Interfaces: Principles and practice, Oxford University Press.

Doctora en ingeniería, mención inteligencia computacional, señales y sistemas, Universidad Nacional del Litoral (UNL).
Investigadora asistente del IMAL-UNL-Conicet.
Colaboradora en el Brain Modulation Lab, Massachusetts General Hospital, Harvard Medical School, Boston.



